Load local and remote ROS 1 (.bag) files, or connect directly to a live ROS 1 stack.
Live data
Install ROS 1, and make sure you are on the same network as the robot.
In Foxglove, select "Open connection" in the "Open data source" dialog.
Foxglove WebSocket
We recommend Foxglove WebSocket as the easiest way to get connected – especially if you have a network firewall between ROS and Foxglove, as it requires your ROS host to have only one port open.
This option requires running an extra ROS node (foxglove_bridge) – follow the installation directions here.
Connect
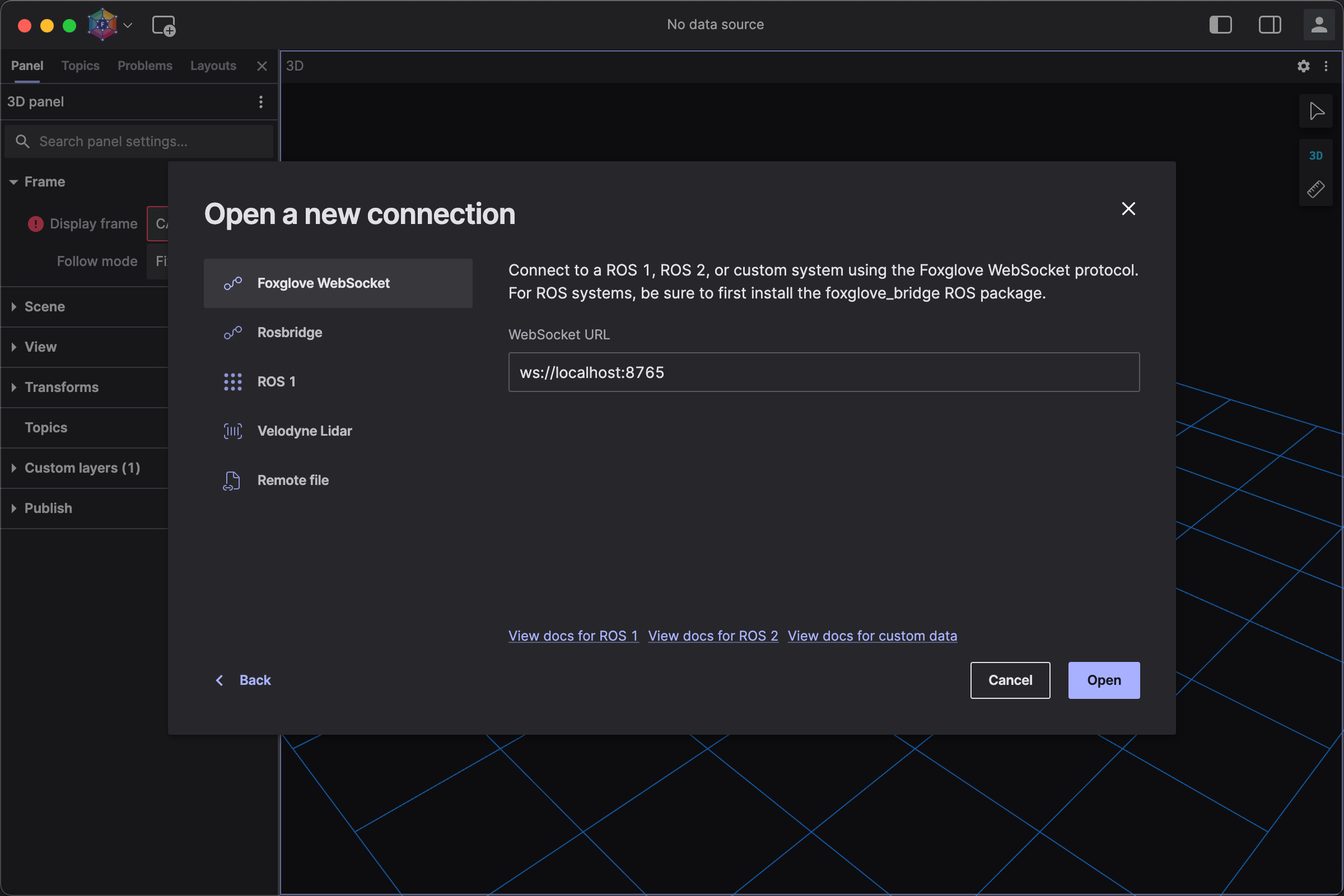
Select "Foxglove WebSocket" in the "Open data source" dialog, then enter the URL to your Foxglove bridge server:
Limitations
Foxglove WebSocket connections support publishing back to your ROS stack, as well as reading and setting ROS parameters.
Rosbridge
NOTE: For performance reasons, we recommend using the Foxglove WebSocket connection instead.
Limitations
Rosbridge connections support publishing back to your ROS stack, but not reading or setting ROS parameters.
Native
NOTE: Docker for Mac unfortunately does not expose all container ports to the macOS host, and so does not support bridge or host networking. When running ROS on a Mac, use the Foxglove WebSocket or the Rosbridge connection instead.
Connect directly to your running ROS stack via a native TCP (Transmission Control Protocol) connection to access your ROS master and/or nodes directly.
Once you have a working ROS 1 setup on your computer, run roscore in your terminal to start your ROS master.
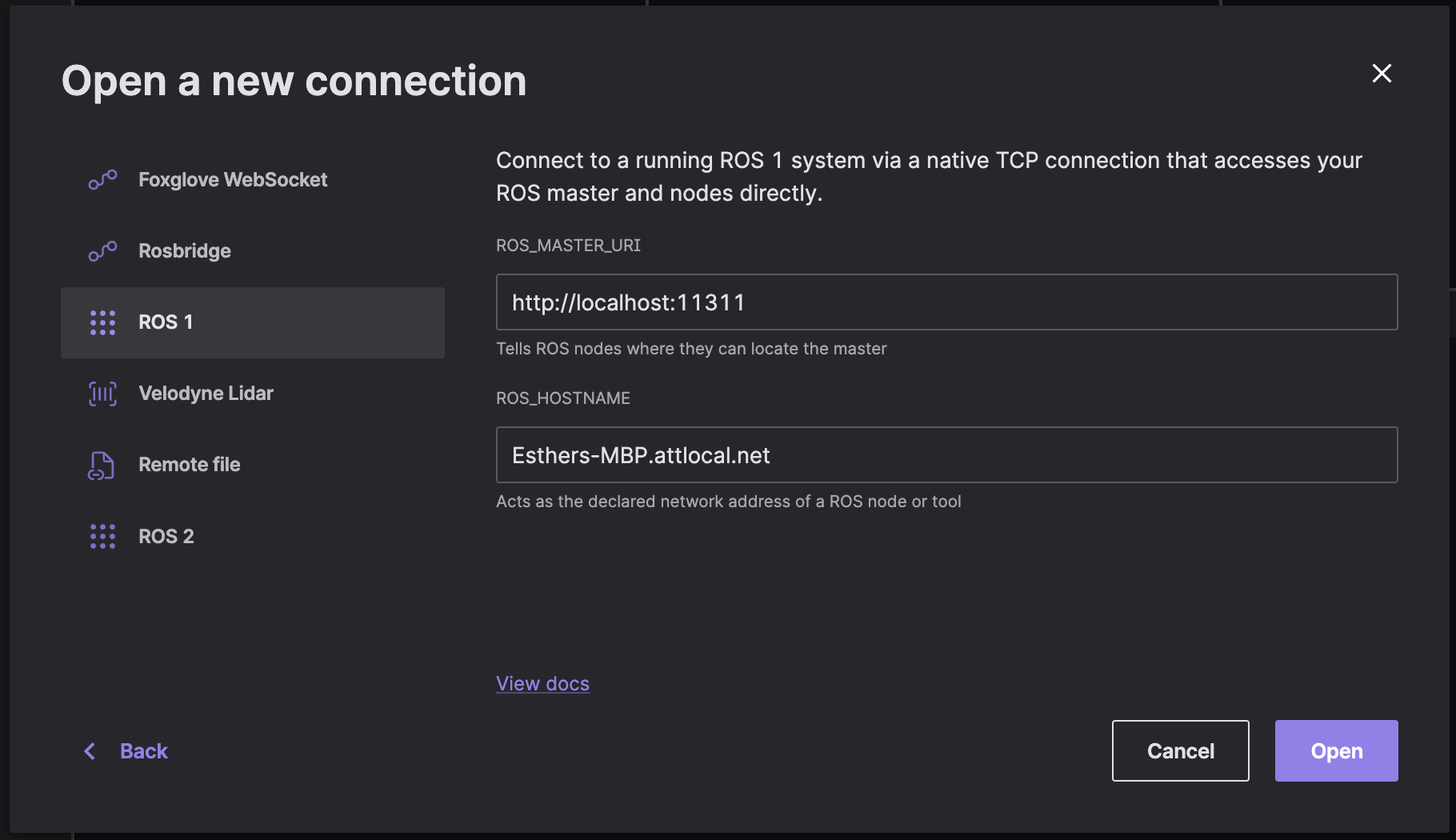
Select "ROS 1" in the "Open data source" dialog, and enter your ROS_MASTER_URI (ROS master's IP and port) and ROS_HOSTNAME:
If you're experiencing any issues, ensure you have unrestricted network connectivity between your ROS stack and Foxglove, as ROS uses multiple ports to communicate.
If you're running ROS and Foxglove on different machines see the ROS 1 Network Setup docs to make sure your environment is configured correctly.
Remote file
Select "Remote file" in the "Open data source" dialog, and enter the URL to your remote .bag file.